


与端到端相比,VLA给Zhihua带来了什么变化?
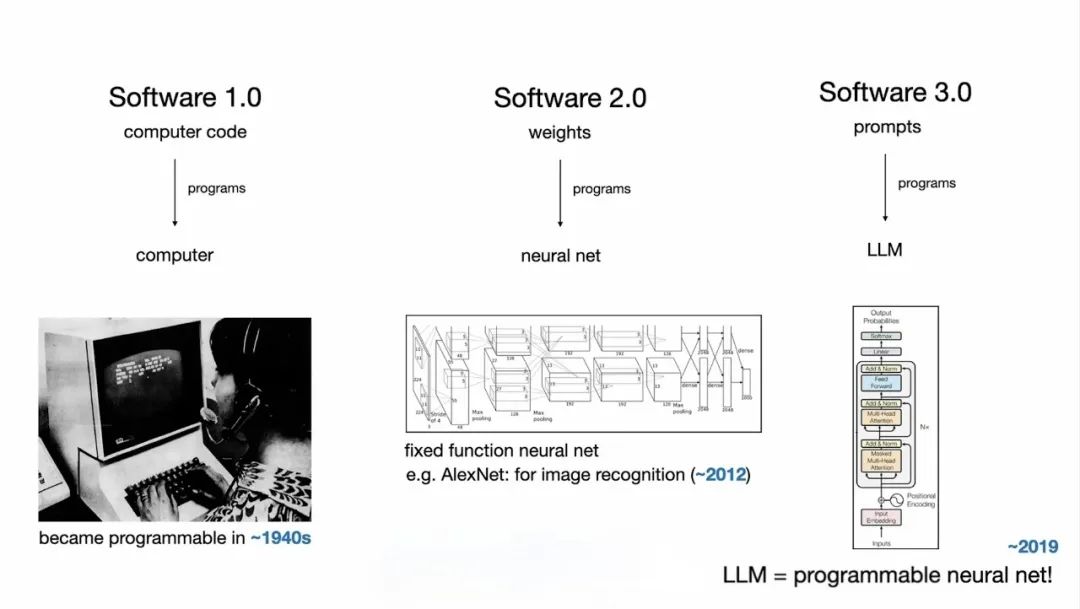 长期以来,自动驾驶一直是智能电动汽车市场前最有竞争力的驾驶,也是增长最快的轨道。一切都有其因果关系。自动驾驶是如此受欢迎,以至于投资资本,消费者关注它。这主要是因为自动驾驶的产品或服务可以创造大量的用户数量。说到这,自动驾驶系统的价值与自动驾驶的水平密切相关。但是,在汽车公司明显偶然的宣传下,简单的人经常使用驾驶系统作为自主驾驶系统,并且很少研究不同级别的自主驾驶之间的界限,因此由于滥用智能驾驶系统而导致的一年经常发生事故。有些事故就像羽毛一样,消费者仍然可以在事故发生后不停下来发布它们。有些事故受到威胁。也许在他们生命的最后一刻,各方刺伤了象征性的高管在犹豫离开世界之前受到了100次惩罚。绝对没有一个无知的买家,他们不知道联合辅助驾驶和高自主驾驶水平之间的区别,并且无意间对他们抱有相同的期望。对于汽车公司而言,只需不断改进技术并尽最大努力在不同情况下提高系统性能,而不会受到突然事故的影响。经过一年的端到端购买后,Thebasic汽车公司和智能驾驶解决方案供应商已转向VLA Solutions,VLA希望实现令人惊叹的跳跃,并帮助将系统转移到L3上,从而真正可以使用户成为用户。在这种情况下,有必要讨论与端到端的VLA的好处,以便汽车公司忽略端到端的前小女友?而且,主要顶级公司的VLA是否有相同的面孔或不同的路线? VLA和6月17日的端到端,Andrej Karpathy,表格特斯拉自主驾驶的ER主任在YC AI企业家营地的“软件”主题发表了演讲。在2017年提出了软件2.0概念之后,Andrej Karpathy再次提出了软件概念3.0,总结了软件形式的关键变化。软件范式1.0的开发是代码的写作,主体是代码,软件2.0的开发是设计专用的神经网络,主体是神经网络的重量,软件3.0的开发是提供直接的单词,主体是大型语言模型,而交互式界面是操作系统。图像来源:Andrej Karpathy借用了这一代人,以区分VLA和常规的端到端解决方案。显然,端到端是2.0 ERA的产品,VLA是3.0 ERA软件的结果。当然,不建议彻底复制它。毕竟,Andrej Karpathy的最初意图是更改软件开发方法。但是,大型语言模型的出现是软件2.0 ERA与软件3.0 ERA之间的界限。同样,传统的端到端解决方案是一种用于自动驾驶的专用小型模型,VLA引入了具有通用能力的大语言模型之间的主要区别也是大语言模型。除了专家和概括之间的差异外,还可以考虑到传统的端到端解决方案是端到端形式的小型模型。在VLA基于传统的端到端解决方案引入了大型模型LLM模型之后,它成为了端到端形式的巨大模型。图像起源:与小型模型相比,大型模型显然更符合规模定律。比例定律:通过更多的训练数据和更大的参数量表提高模型的能力。应当指出的是,神经网络的架构是传统的端到端插入非常简单。在数据培训量超过1000万个剪辑之后,很难同时继续改进。 VLA引入了大型语言模型,该模型通过较大的参数提供了更高的表达自由度,并且可以开发一个模型,该模型可以建立更多的级别,更长的时间序列和由更大的训练数据驱动的全球语义特征。大型语言模型的引入确保规模法继续遵守,这也意味着,尽管模型的体系结构保持不变,但企业可以在未来的模型中实现准确的绩效预测。对于越来越短期资源的汽车公司来说,这意味着他们在模型中的培训不值得Pera Vanity。当然,这也意味着,VLA中智能驾驶公司的重复和探索将很长一段时间内都不会保持上限。除了形式和内容的差异外,常规的端到端和VLA当然具有不同的功能。小米电动机的负责人米彭在G7预售新闻发布会上使用大脑和小脑作为隐喻,而不是直接谈论传统的端到端和VLA的功能。哥哥说,传统的端到端解决方案执行小脑的功能,其功能是“使汽车打开”。 VLA的端到端解决方案的演变引入了一种大型语言模型,该模型迫使人类知识,执行大脑思维功能,其功能是“使汽车修复”。图像来源:米彭电动机可以在此处摘要。如果ITO是形式,内容,功能或功能,那么传统的端到端和VLA之间的主要区别没有大型端到端语言模型,因为VLA介绍了可以发挥决策中心或大脑作用的大型语言模型。这两条VLA路线谈论了基于传统端到端解决方案的大型语言模型的引入。该行业有行动乌利之前有另一种技能,这代表了自动系统双重系统的完美解决方案。 7月24日,Ideal Auto建议使用端到端解决方案的单个NVIDIA ORIN X和一个运行视觉语言模型的单个Orin X的双系统解决方案。凭借VLM积极思考和理解世界的能力,双重系统解决方案可以识别公交和水道,识别复杂的shovelsremembermembermember的交通,并在一定程度上能够阅读和理解可能具有人脑的交通信息。图像来源:尽管完美的自动VLM引入了大型语言模型,但它并未直接参与轨迹的产生,也无法使用车辆侧收集的大量“视觉输入 - 横向输出输出”数据进行训练。此外,VLM没有3D理解功能,该行业还留下了双重系统解决方案。至于vla,daluooh,走到一边,两个先驱者探索了当地自动的VLA解决方案制造商,完美的汽车和小米汽车将采用略有不同的路线。两者之间的差异主要在两个方面看到。首先,理想的自动首先使云基型模型变形,然后加强了研究NG蒸馏端侧模型。木蓬自动首先完善了云基型模型的研究,然后在车辆的末端打喷嚏。其次,为了复杂处理用户的语音控制车辆,完美的自动遵循端云组合路线,并且云基本模型执行复杂的拆卸任务,然后在最后拆卸了不可分割的简单任务。米彭汽车拥有一个当地的大型型号,其中驾驶舱参数为10亿b(100亿亿亿),并且通过中央融合的体系结构,驾驶舱末端的拆卸指令在Zhihua系统中发布了实施。图像来源:完美的汽车之间的区别在于,米彭对具有十亿个参数的云基本模型,非常适合研究具有10亿参数的VLA VLA模型的加固。这更好地取决于特定的性能。但是,引入加强研究的步骤正是传统的端到端和VLA解决方案之间的差异。传统的端到端解决方案依靠数据驱动器来促进传感器数据数据之间关系的原因。对这种模仿的研究对场景语义的深入分析没有。它只会知道驾驶场景,但不知道原因。 VLA中的大语言模型不仅知道原因,而且还知道原因。第二个区别在于如何在不退出智能驾驶系统的情况下实现人机驾驶。理解数十亿参数的语言的能力显然不足以在语音命令上处理复杂的任务。云工作的这一部分被完全丢弃了,但是由于网络断开和弱网络等因素,可能是无法接受的 - 可接受的延迟。此外,它涉及云操作问题。米彭直接将大型的数十亿美元参数构成,可以处理驾驶舱中的复杂作品。缺点是,驾驶舱需要使用具有相同功能到达道路(顶部)的AI芯片。没有自己的芯片,它将更加昂贵。最后写
长期以来,自动驾驶一直是智能电动汽车市场前最有竞争力的驾驶,也是增长最快的轨道。一切都有其因果关系。自动驾驶是如此受欢迎,以至于投资资本,消费者关注它。这主要是因为自动驾驶的产品或服务可以创造大量的用户数量。说到这,自动驾驶系统的价值与自动驾驶的水平密切相关。但是,在汽车公司明显偶然的宣传下,简单的人经常使用驾驶系统作为自主驾驶系统,并且很少研究不同级别的自主驾驶之间的界限,因此由于滥用智能驾驶系统而导致的一年经常发生事故。有些事故就像羽毛一样,消费者仍然可以在事故发生后不停下来发布它们。有些事故受到威胁。也许在他们生命的最后一刻,各方刺伤了象征性的高管在犹豫离开世界之前受到了100次惩罚。绝对没有一个无知的买家,他们不知道联合辅助驾驶和高自主驾驶水平之间的区别,并且无意间对他们抱有相同的期望。对于汽车公司而言,只需不断改进技术并尽最大努力在不同情况下提高系统性能,而不会受到突然事故的影响。经过一年的端到端购买后,Thebasic汽车公司和智能驾驶解决方案供应商已转向VLA Solutions,VLA希望实现令人惊叹的跳跃,并帮助将系统转移到L3上,从而真正可以使用户成为用户。在这种情况下,有必要讨论与端到端的VLA的好处,以便汽车公司忽略端到端的前小女友?而且,主要顶级公司的VLA是否有相同的面孔或不同的路线? VLA和6月17日的端到端,Andrej Karpathy,表格特斯拉自主驾驶的ER主任在YC AI企业家营地的“软件”主题发表了演讲。在2017年提出了软件2.0概念之后,Andrej Karpathy再次提出了软件概念3.0,总结了软件形式的关键变化。软件范式1.0的开发是代码的写作,主体是代码,软件2.0的开发是设计专用的神经网络,主体是神经网络的重量,软件3.0的开发是提供直接的单词,主体是大型语言模型,而交互式界面是操作系统。图像来源:Andrej Karpathy借用了这一代人,以区分VLA和常规的端到端解决方案。显然,端到端是2.0 ERA的产品,VLA是3.0 ERA软件的结果。当然,不建议彻底复制它。毕竟,Andrej Karpathy的最初意图是更改软件开发方法。但是,大型语言模型的出现是软件2.0 ERA与软件3.0 ERA之间的界限。同样,传统的端到端解决方案是一种用于自动驾驶的专用小型模型,VLA引入了具有通用能力的大语言模型之间的主要区别也是大语言模型。除了专家和概括之间的差异外,还可以考虑到传统的端到端解决方案是端到端形式的小型模型。在VLA基于传统的端到端解决方案引入了大型模型LLM模型之后,它成为了端到端形式的巨大模型。图像起源:与小型模型相比,大型模型显然更符合规模定律。比例定律:通过更多的训练数据和更大的参数量表提高模型的能力。应当指出的是,神经网络的架构是传统的端到端插入非常简单。在数据培训量超过1000万个剪辑之后,很难同时继续改进。 VLA引入了大型语言模型,该模型通过较大的参数提供了更高的表达自由度,并且可以开发一个模型,该模型可以建立更多的级别,更长的时间序列和由更大的训练数据驱动的全球语义特征。大型语言模型的引入确保规模法继续遵守,这也意味着,尽管模型的体系结构保持不变,但企业可以在未来的模型中实现准确的绩效预测。对于越来越短期资源的汽车公司来说,这意味着他们在模型中的培训不值得Pera Vanity。当然,这也意味着,VLA中智能驾驶公司的重复和探索将很长一段时间内都不会保持上限。除了形式和内容的差异外,常规的端到端和VLA当然具有不同的功能。小米电动机的负责人米彭在G7预售新闻发布会上使用大脑和小脑作为隐喻,而不是直接谈论传统的端到端和VLA的功能。哥哥说,传统的端到端解决方案执行小脑的功能,其功能是“使汽车打开”。 VLA的端到端解决方案的演变引入了一种大型语言模型,该模型迫使人类知识,执行大脑思维功能,其功能是“使汽车修复”。图像来源:米彭电动机可以在此处摘要。如果ITO是形式,内容,功能或功能,那么传统的端到端和VLA之间的主要区别没有大型端到端语言模型,因为VLA介绍了可以发挥决策中心或大脑作用的大型语言模型。这两条VLA路线谈论了基于传统端到端解决方案的大型语言模型的引入。该行业有行动乌利之前有另一种技能,这代表了自动系统双重系统的完美解决方案。 7月24日,Ideal Auto建议使用端到端解决方案的单个NVIDIA ORIN X和一个运行视觉语言模型的单个Orin X的双系统解决方案。凭借VLM积极思考和理解世界的能力,双重系统解决方案可以识别公交和水道,识别复杂的shovelsremembermembermember的交通,并在一定程度上能够阅读和理解可能具有人脑的交通信息。图像来源:尽管完美的自动VLM引入了大型语言模型,但它并未直接参与轨迹的产生,也无法使用车辆侧收集的大量“视觉输入 - 横向输出输出”数据进行训练。此外,VLM没有3D理解功能,该行业还留下了双重系统解决方案。至于vla,daluooh,走到一边,两个先驱者探索了当地自动的VLA解决方案制造商,完美的汽车和小米汽车将采用略有不同的路线。两者之间的差异主要在两个方面看到。首先,理想的自动首先使云基型模型变形,然后加强了研究NG蒸馏端侧模型。木蓬自动首先完善了云基型模型的研究,然后在车辆的末端打喷嚏。其次,为了复杂处理用户的语音控制车辆,完美的自动遵循端云组合路线,并且云基本模型执行复杂的拆卸任务,然后在最后拆卸了不可分割的简单任务。米彭汽车拥有一个当地的大型型号,其中驾驶舱参数为10亿b(100亿亿亿),并且通过中央融合的体系结构,驾驶舱末端的拆卸指令在Zhihua系统中发布了实施。图像来源:完美的汽车之间的区别在于,米彭对具有十亿个参数的云基本模型,非常适合研究具有10亿参数的VLA VLA模型的加固。这更好地取决于特定的性能。但是,引入加强研究的步骤正是传统的端到端和VLA解决方案之间的差异。传统的端到端解决方案依靠数据驱动器来促进传感器数据数据之间关系的原因。对这种模仿的研究对场景语义的深入分析没有。它只会知道驾驶场景,但不知道原因。 VLA中的大语言模型不仅知道原因,而且还知道原因。第二个区别在于如何在不退出智能驾驶系统的情况下实现人机驾驶。理解数十亿参数的语言的能力显然不足以在语音命令上处理复杂的任务。云工作的这一部分被完全丢弃了,但是由于网络断开和弱网络等因素,可能是无法接受的 - 可接受的延迟。此外,它涉及云操作问题。米彭直接将大型的数十亿美元参数构成,可以处理驾驶舱中的复杂作品。缺点是,驾驶舱需要使用具有相同功能到达道路(顶部)的AI芯片。没有自己的芯片,它将更加昂贵。最后写 上一篇:全球范围限制10辆汽车:Pagani-Pargain Huayra Codalun
下一篇:没有了
下一篇:没有了

